Luca Carlone walks across the MIT campus in Cambridge, his mind already racing with the possibilities of a robot that could remember where every tool, bike, and blueprint was left—down to the flat tire on a red bicycle outside the Stata Center. At his SPARK Lab, a breakthrough is unfolding: a robot that doesn’t just map its surroundings, but remembers them in rich, language-accessible detail, moment by moment. This isn’t science fiction—it’s DAAAM, a new memory framework developed by MIT researchers that could transform how robots interact with the real world. In factories, hospitals, or even our homes, robots might soon answer questions like “Where did I leave my keys?” with the same ease we recall yesterday’s coffee break.
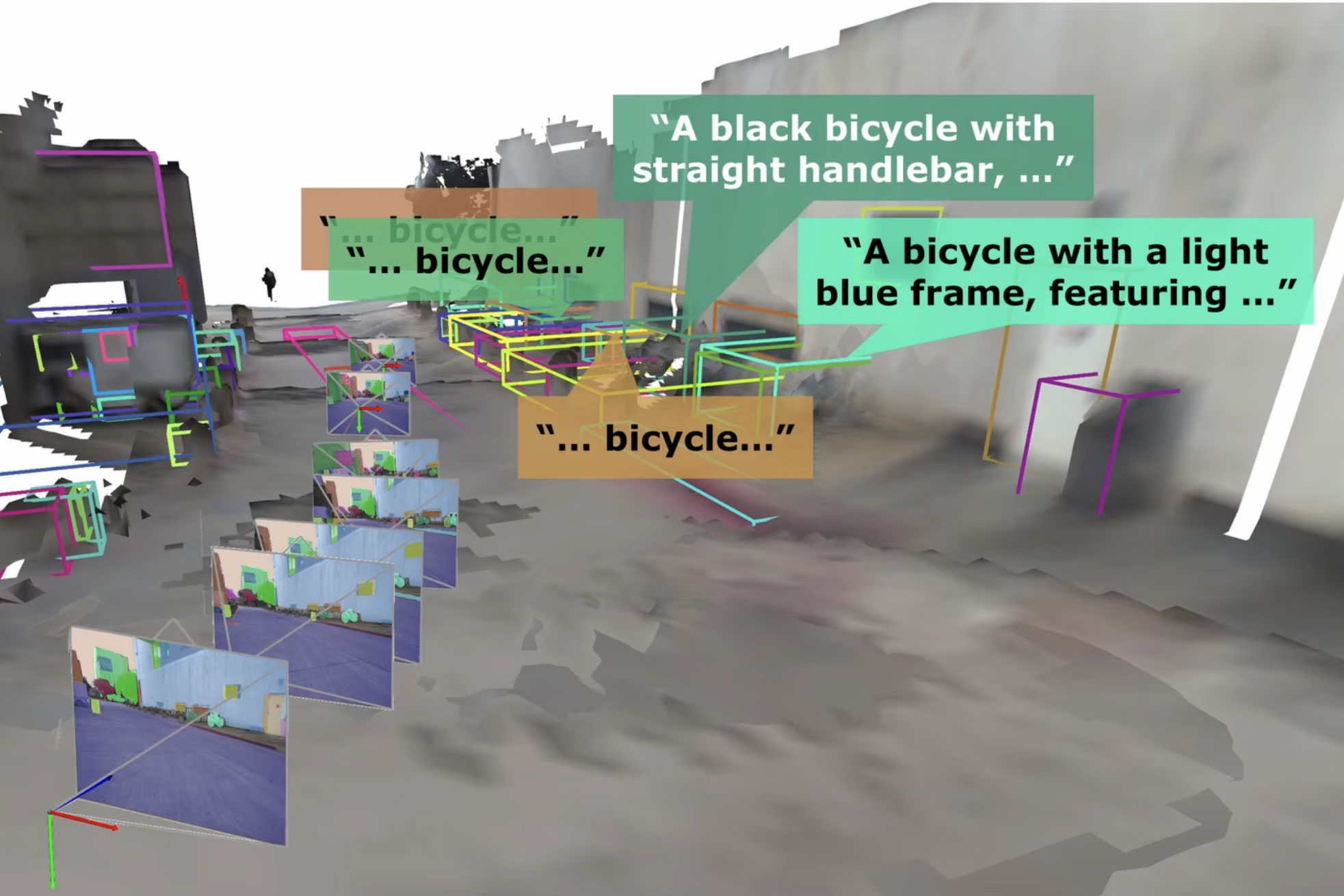
For decades, robots have struggled with spatiotemporal memory—the human ability to link space and time in recollection. While a factory worker remembers where she left a half-built component last night, a robot would need to re-scan the entire floor. DAAAM changes that by merging high-resolution 3D mapping with multimodal AI that describes what it sees. As a robot moves through a building or campus, it doesn’t just record coordinates—it notes that the Stata Center has jagged, postmodern architecture, that a bike rack holds five bicycles, and that the red one has a flat tire. These observations are stored in a spatially organized 3D map, grouped by location and updated in real time.
The real innovation lies in speed and scalability. Traditional systems take seconds to annotate just a few objects—too slow for a robot navigating a dynamic environment. DAAAM, developed by Carlone, graduate student Nicolas Gorlo, and Lukas Schmid (now a professor at the University of Technology Nuremberg), uses key-frame optimization to select the clearest images of multiple objects at once. By annotating clusters of items in parallel, the system runs ten times faster than existing methods, making real-time use feasible. It’s designed to scale across entire campuses or industrial sites, remembering not just where things are, but when they were seen and how they’ve changed.
The implications stretch far beyond robotics. Augmented reality systems could use DAAAM to guide maintenance workers to a malfunctioning valve or help commuters navigate complex transit hubs by recalling past routes and obstacles. In emergency response, a drone equipped with this memory could retrace its flight path and report exactly where a hazard appeared.
Presented at the Conference on Computer Vision and Pattern Recognition (CVPR), DAAAM isn’t just a technical leap—it’s a step toward machines that think more like us. “It is turning a traditional map into a language-based map that is easier for the robot to think about and access using language,” Carlone says. As robots begin to share our spaces and tasks, the future may not be about smarter machines, but ones that remember, reason, and respond—just like we do.