Kota Kondo was ten years old when the Fukushima Daiichi nuclear accident unfolded on his television screen, workers in hazmat suits entering radiation-soaked buildings that no child could forget. That childhood witness to human vulnerability and robotic necessity shaped what would become MIGHTY—an open-source trajectory-planning system developed by researchers at MIT and the University of Pennsylvania that lets unpiloted aerial vehicles navigate collapsed buildings and complex obstacles in real time, potentially saving lives in the moments that matter most.
Search-and-rescue after earthquakes and industrial disasters hinges on speed and precision. A UAV could fly through rubble to map a scene and locate survivors, but teaching a robot to adjust its path in milliseconds while dodging sudden obstacles has remained fiercely difficult. Most solutions force an impossible choice: commercial systems generate smooth, fast trajectories but cost hundreds of thousands of dollars, while open-source alternatives lag in performance or demand specialized expertise to operate.
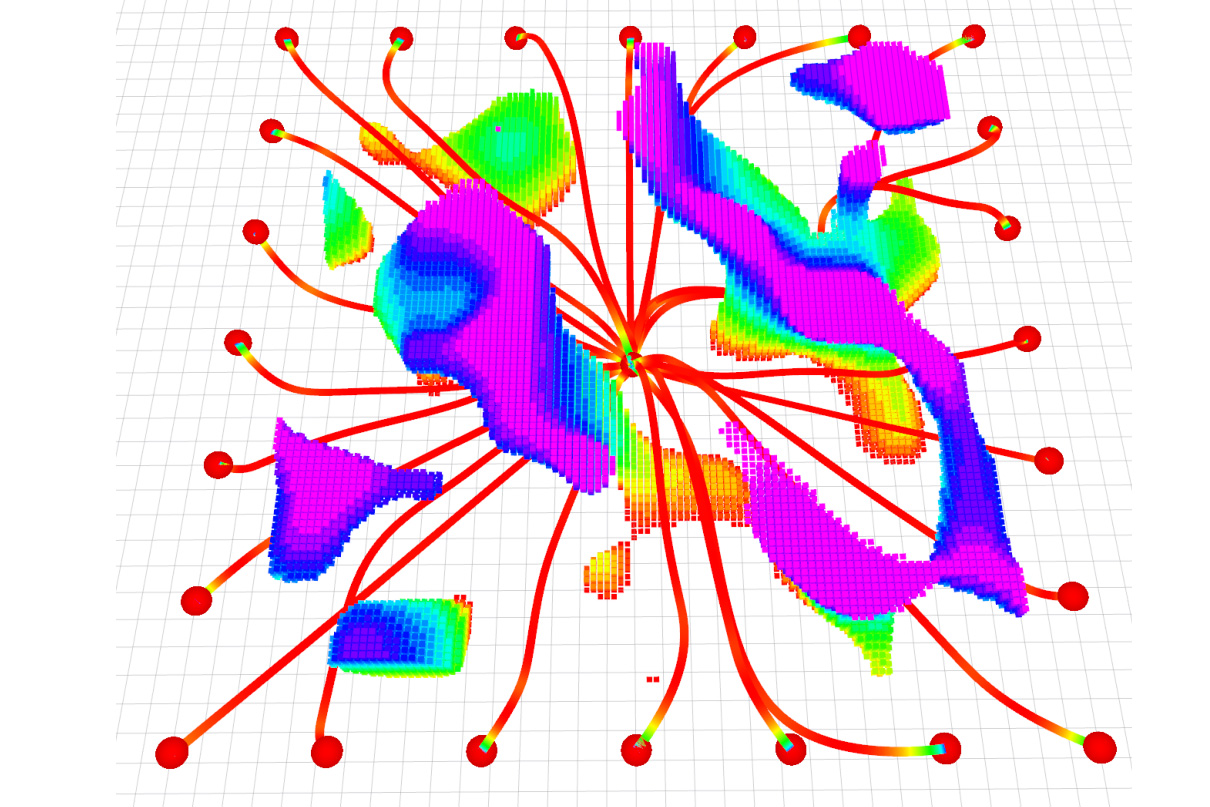
MIGHTY dissolves that tradeoff. The system, developed by aeronautics graduate student Kota Kondo alongside Yuwei Wu of UPenn and led by MIT's Jonathan P. How and UPenn's Vijay Kumar, uses a mathematical technique called a Hermite spline to optimize travel time and flight path together in a single step. Rather than fixing a travel-time budget first and hunting for the best path within it—a method that forces UAVs to increase speed when obstacles require detours—MIGHTY optimizes both dimensions simultaneously. This dual optimization creates smooth trajectories that can be precisely controlled, allowing the vehicle to react to hazards without jerking or overshooting its destination.
The clever engineering lies in managing the computational burden. Simultaneous optimization of space and time creates a larger, more complex problem that could take too long to solve on a robot's onboard computer. Kondo and his colleagues sidestepped this by making an intelligent initial guess at a trajectory, then refining it iteratively using real-time sensor data from the UAV's lidar. The system runs fast enough on onboard hardware alone—no expensive external processors required.
Because MIGHTY is open-source and requires no proprietary software, it democratizes high-performance trajectory planning. Any researcher, student, or company anywhere in the world can download and deploy it freely. The implications stretch beyond search-and-rescue into last-mile delivery in urban environments where UAVs must thread between buildings, power lines, and pedestrians, or industrial inspection of wind turbines and other complex structures where human entry would be dangerous or impossible.
The work appears in IEEE Robotics and Automation Letters and represents something quieter than a technological breakthrough: an act of generosity. By refusing to gate-keep capability behind cost and proprietary licensing, Kondo and his collaborators have handed a powerful tool to the global research community. In disaster zones and industrial sites and rescue operations yet to unfold, machines will navigate paths their makers could never physically walk—guided by software that anyone, anywhere, can build upon.